Elmer, the hall sensors tell the controller which windings to energise according to the position of the magnets, even when the wheel is stationary.
Maximum current draw
(and Maximum torque) should occur when full throttle is applied with the wheel stationary. As soon as the wheel starts to move, the torque and current consumption should start to decrease, so at 5mph it should be less than the results measured at 0 mph.
To prove this, I carried out a stall torque test on my original MKI Magic Pie, using a set of digital luggage scales attached by a piece of rope tied to the outer diameter of my tyre as shown here:

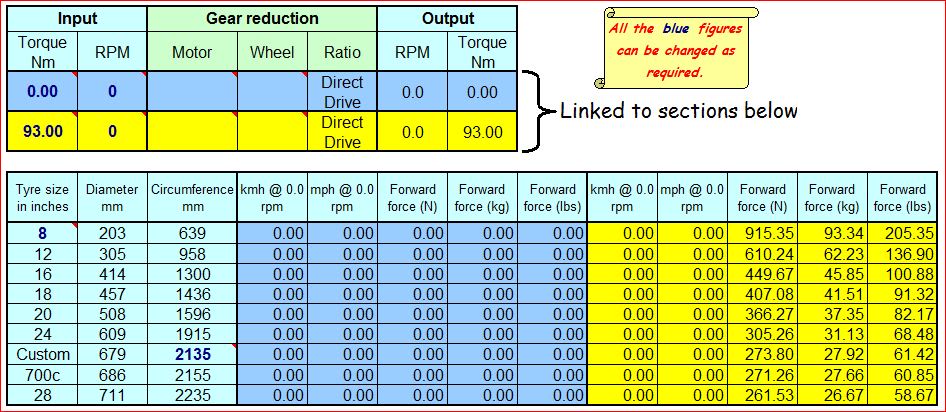
I opened the throttle fully, but the Pie would cut out every time before the scales could lock and retain the reading, but I was able to read at least 28kgs/61Lbs of force on a couple of the tests, and by entering the circumference of my 26" x 2.3" tyre into my spreadsheet I reckon that my stall torque is somewhere around 93Nm!
My Turnigy Watt Meter recorded a massive 65.94 Amps @ 25.6V
(1,694 Watts) from my 25.9V 10Ah LiPo pack, which is the highest amperage I have recorded since I
modified my controller almost 12 months ago, and this was with the wheel 100% stationary.
From my point of view, this test was pretty conclusive.

Unfortunately, there is negative side to this test, I was so impressed with the results on the 25.9V pack that I decided to try it with double the voltage
(51.8V 10Ah). So I connected another LiPo pack in series and proceeded to do the same test as before, but as I started to accelerate and the scales started to rise, the motor suddenly cut out, accompanied by the dreaded five beeps that usually indicate the death of the controller.

I instinctively disconnected and reconnected the battery to see if the controller would reset and work again
(which it didn't) without realising that I was also disconnecting my watt meter at the same time, so I never got to see how high the power consumption was that caused the failure.

To be perfectly honest, I'm amazed that this controller has actually lasted this long. It's been nearly 12 months since the shunt was modified, and since then, it's been delivering almost 60 Amps on a regular basis.
Following the controller failure, the wheel was lumpy to turn so I quickly removed it and pulled it apart to perform a post mortem.
It would appear that just one of the MOSFETs has died, so I've just replaced it with one of the five remaining good ones taken from Ginge's dead controller that I blew up during my twin controller experiment 12 months ago.
Tomorrow I will put the wheel back together again and see if the controller still works, and if it does, I definitely won't be performing the stall torque test on the high voltage again.
I'll let you know whether it works again after I've reassembled and tested it.
 Alan
Alan 

