Hi and

to the forum Tomaz.
1. I would like to have a single side mount of the wheel (without the need for the fork). Can the wheel axel be replaced?I'm pretty sure the axles are just press fitted into the stator, with a locating key & keyway to transmit the torque to the axle, so it should be possible to carefully press them out again.

On the MPIIIs, it should be possible to machine the existing axle to receive a suitable piece of steel tubing to join the two axles together.
A steel disc could be welded to the tube and secured to the stator with bolts through the existing internal controller heatsink assembly. Or alternatively, the steel disc could be used instead of it the internal controller assembly
(as drawn below) if you decided to use an external controller.
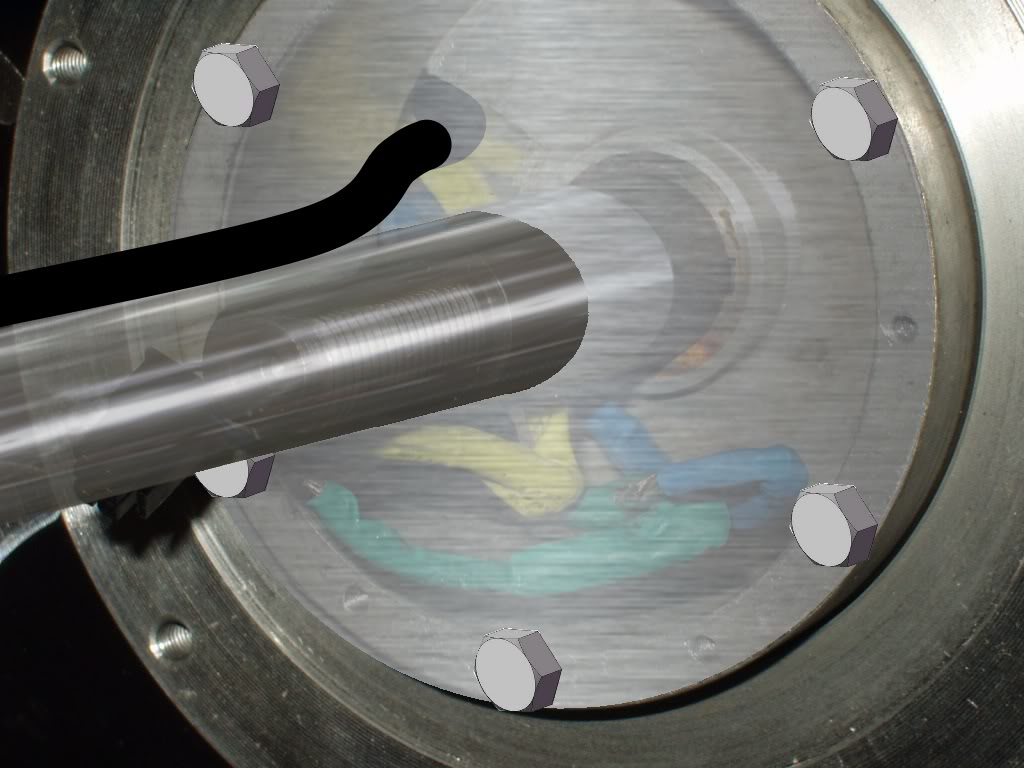
As you will not be using disc brakes, the cooling fan/disc mounting ring can either be left off completely, or machined out in the centre to give clearance for the motor cables which could be strapped to the outside of the extended axle tube. The machining of the centre holes would need to be done prior to the fan assemblies being slid over the extension tube
before the steel discs were finally welded in place.
 2. What are the voltage levels for the input signals for the throttle, brake, ..., to drive the controller? Are they Analog, Digital, are they on/off type or is the input linear?
2. What are the voltage levels for the input signals for the throttle, brake, ..., to drive the controller? Are they Analog, Digital, are they on/off type or is the input linear?Typically the voltage is between 0.8-4.5V from throttle hall sensor.
(1.25V-3.5V appears to be the working throttle range).3. I've seen the pin for the Reverse ... Does this Reverse the motor direction? Does the controller respond immediately to the change of direction (provided the motor has just stopped)?Check out
my video on YouTube and see for yourself.
4. Can two wheels be driven by the same battery (when using regenerative braking)?This should be fine, the Dual Piant is made to work that way.
5. Is there a way to measure the speed of the wheels using the hall sensors in the wheel?You should be able to somehow use the high/low
(+5V/0V) pulses from one of the hall sensors, 28 high/low pulses = one revolution
(28 North + 28 South = 56 poles), but you'll have to figure out your own way of converting the pulses to give the relative speed readings.
I'm not so sure that the standard internal controller will be responsive enough to cope with the necessary directional input changes that will be required to maintain perfect balance. Also, the regenerative braking does seem to have a slight delay before it takes effect. I was actually toying with the idea of using a tilt switch connected to the brake switch, just to stop me from flipping over backwards on hills when I pull away too quick, but I'm not sure that the regen would respond quick enough to prevent it from happening.

I think the joystick controlled brushless motor controller
(which is designed for wheelchair use) could be a better choice
(assuming it's responsive enough).
Perhaps we can ask someone at GM to try and balance one of the electric wheelchairs on its rear wheels to see how responsive the joystick control actually is? Henry would be a prime candidate as he has already mastered the electric unicycle, but is he ready for the ultimate wheelchair challenge?
 Alan
Alan 

